2025年12月10日、東京国際フォーラムで開催された「“くるまからモビリティへ”の技術展 2025」。自動車という枠を超え、モビリティ社会の未来を描く本イベントには、電動化・自動運転・コネクテッド技術など、次世代モビリティを支えるさまざまなソリューションが集結しました。
ハートランド・データも本イベントに参加し、会場内の講演では、従来の車載ソフトウェア開発が抱える課題と、それに対する私たちのアプローチをご紹介しました。
本記事では、当日の講演内容を振り返りながら、SDV時代の車載ソフトウェア開発現場に役立つヒントをお届けします。
CONTENTS
高速Inner Loopで車載ソフトウェア開発を加速
SDV(Software Defined Vehicle)時代において、開発スピードを左右する重要な要素の一つが「Inner Loop」の速さです。今回の講演では、車載ソフトウェア開発の現場で実際に起きている課題と、それをどう乗り越えるかについて、具体例を交えてお話ししました。

生成AIで車載ソフト開発はどう変わる?検証工程の課題
生成AIの登場により、コード生成は瞬時に行えるようになり、実装工程のスピードは飛躍的に向上しています。一方で、検証工程はどうでしょうか。
実際には、検証工数は減るどころか、むしろ増える可能性があります。生成AIが生み出したコードも、品質を担保するためには必ず検証が必要です。コード量が増えれば、その分だけテスト対象も増え、結果として検証が追いつかなくなる。そんな状況が現場で起き始めています。
なぜ検証が増えるのか?生成AIと品質保証の現実
生成AIは「コード記述」という作業を大幅に効率化します。しかし、生成されたコードが正しく、安全に動作するかどうかは別の課題です。人が書いたコードと同様、品質保証のためのテストは欠かせません。
さらに、生成AIは短時間で大量のコードを生成できるため、検証対象は一気に膨れ上がります。 車載ソフトウェアの場合、機能安全規格や各種規格への対応が求められるため、テストの粒度も細かく、検証範囲は広範囲に及びます。
つまり、AIによって加速するのは「実装」であり、「検証」はそのスピードに比例して増えていく構造にあります。

車載開発におけるシフトレフトの限界と、実機テスト高速化の必要性
こうした課題への一般的な対策として挙げられるのが「シフトレフト」です。検証工程を前倒しし、早い段階で問題を見つけることで、開発全体の手戻りを減らそうという考え方です。
しかし、車載ソフトウェア開発には、実機検証に起因する避けられない制約があります。 CAN通信やECU連携、センサー入力など、車載システム特有の要素は、実機でなければ確認できません。仮想環境で複数同時に検証できるWebシステム開発や純粋なアプリ開発とは異なり、物理的な制約が常につきまといます。
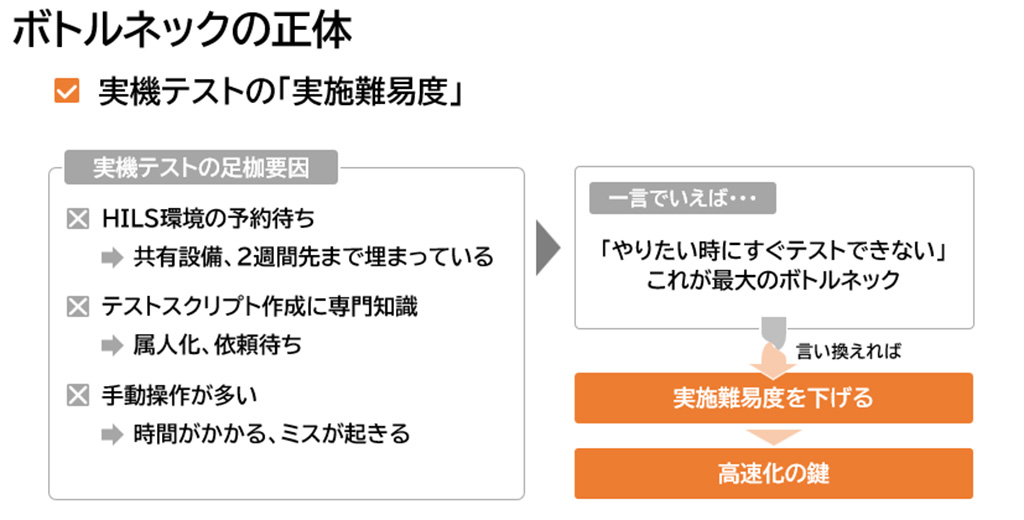
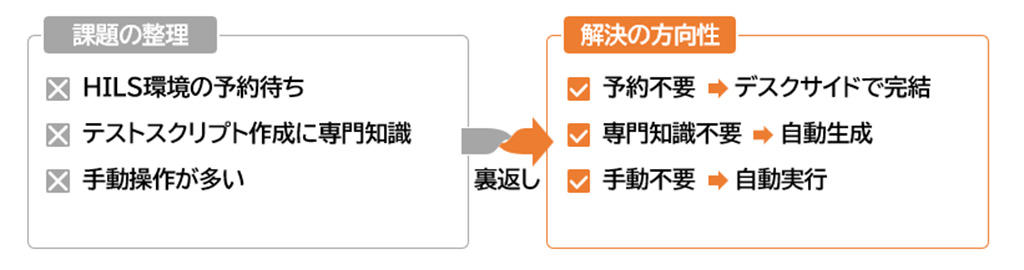
さらに、HILS環境の予約待ちや、専門知識が必要なテスト準備、手動操作の多さなどにより、「やりたい時にすぐテストできない」状況が慢性化しています。この実施難易度の高さこそが、開発スピードを阻む最大のボトルネックです。 だからこそ、実施難易度を下げることが高速化の鍵となります。
Inner/Outer Loopとは?実機テスト高速化の鍵
開発サイクルは、大きく2つのループに分けられます。これはDevOps由来の考え方で、Inner Loop、Outer Loopと呼ばれます。
- Inner Loop
開発者が日常的に繰り返す、コード作成・ビルド・テストのサイクル。本来は1日に何度も回したい工程ですが、車載開発では週1回が限界というケースも珍しくありません。
- Outer Loop
コード統合後に行われるレビューや、CI/CDパイプラインによるテスト工程。こちらも多くの場合、週1~2回程度にとどまりがちです。
Inner Loopで十分に検証してからOuter Loopに進むのが本来の姿です。しかし車載開発では、Inner Loopでも実機テストが必要となるため、実施難易度が高く週1回が精一杯となり、このInner Loopの回転数の差が、開発全体のスピードを大きく制限しています。
目指すべきは、週1回から1日10回へ。Inner Loopを高速化できれば、開発全体が一気に加速します。

高速Inner Loopを実現する3つの要件
そのために必要なのが、以下の3つの条件をクリアした環境です。
- 予約不要:HILS環境の予約待ちをなくし、デスクサイドでテスト可能に
- 専門知識不要:テストスクリプトを自動生成
- 手動操作不要:テストを自動実行
こうした条件を満たすことで、「高速Inner Loop」が実現します。
やりたい時にすぐできる実機テスト環境を構築することで、週1回しか回せなかった検証サイクルを1日10回へ。検証と改善のループを数十倍のスピードで回すことで、開発全体の生産性を大きく引き上げることができます。
AUTOmealによる簡易HILS構築
この高速Inner Loopを支えるのが、ハートランド・データの「組込み開発向けテスト自動化プラットフォームAUTOmeal」です。 AUTOmealは、Raspberry Piをベースとしたテストユニットを中心に構成され、CAN通信、シリアル通信、Ethernetといった各種通信方式に対応しています。さらに、アナログ信号やパルス信号の入出力にも対応しており、ターゲットシステムに合わせて拡張I/Fボードを柔軟に組み替えることが可能です。
テストシナリオの自動生成・自動実行にも対応しているため、専門的な知識がなくてもすぐにテストを開始できます。 従来のHILS環境と比べ、圧倒的に手軽な構成で、デスクサイドでの検証を可能にします。開発現場で「やりたい時にすぐテストできる」環境を実現することで、検証サイクルの高速化を強力にサポートします。
AUTOmealの詳細はこちら →まとめ
今回の講演では、生成AIによって実装工程が高速化する一方で、検証工程が新たなボトルネックになり得るというリスクについてお伝えしました。車載ソフトウェア開発では品質要求が厳しく、検証を省略することはできません。 コードが増えれば検証対象も増える――この前提に立ったとき、開発スピードを本質的に高める鍵は、検証の難易度を下げることにあります。そこでご紹介したのが「高速Inner Loop」という考え方です。
生成AIでコードを生成し、簡易HILSで即座に実機検証を行う。このサイクルを高速で回すことで、検証と改善を数十倍のスピードで進めることが可能となります。
SDV時代には、OTAアップデートを前提とした継続的な開発が求められます。その基盤を支えるのが、高速Inner Loopです。開発スピードを決めるのは、実装ではなく検証工程の革新です。今回の講演では、そのヒントをお伝えしました。
AUTOmealは、「やりたい時にすぐ試せる」実機テスト環境を提供し、開発現場のスピード向上を支援します。実際の動作や活用イメージについて気になる方は、ぜひデモ動画をご覧ください。
【 無料でみられる! 】組込み開発向けテスト自動化プラットフォームAUTOmeal デモ動画
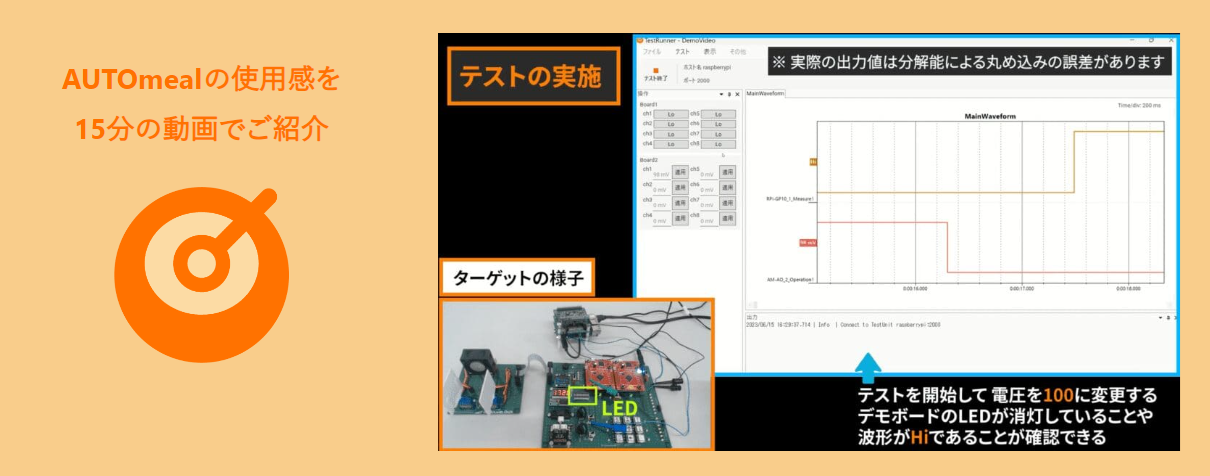
AUTOmealによる環境構築から実際の自動テストの様子まで、基本的な使い方をデモンストレーションいたします。ぜひ実動作をご覧いただき、その効果をご確認ください。